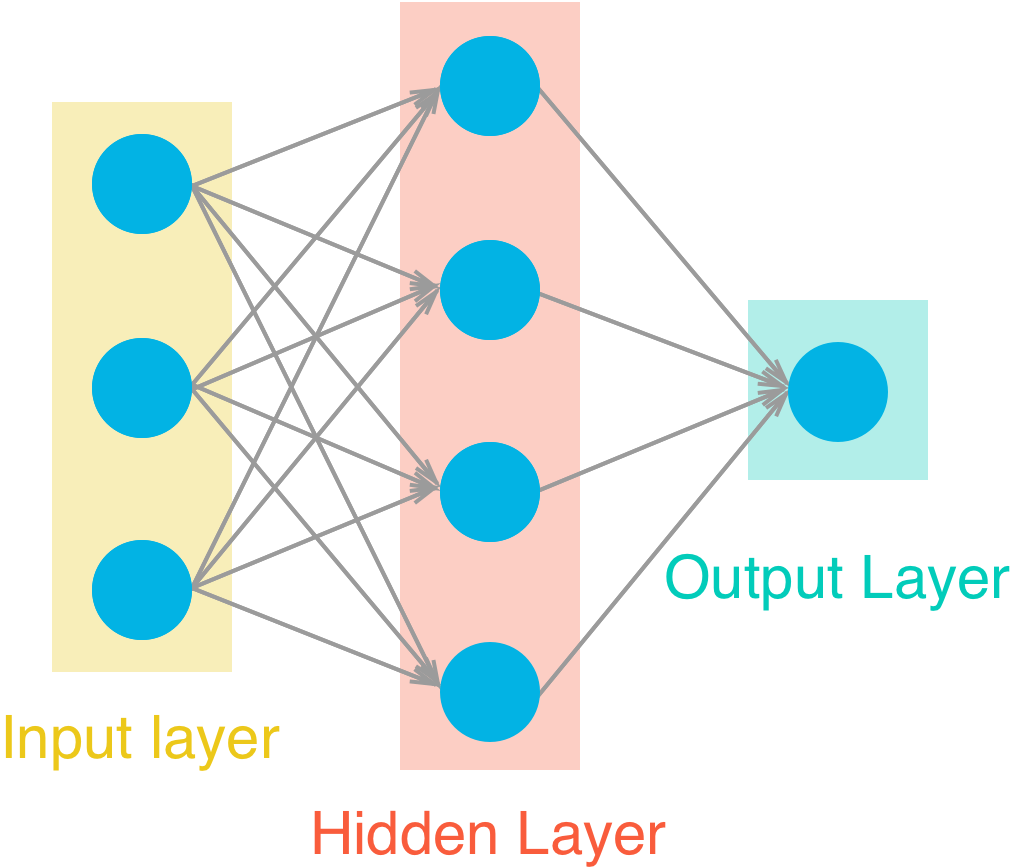
Deep learning
Deep learning is any algorithm more than 1 layer of perceptrons. Where:
Input layer units = features and output units = labels (one if is a regression).
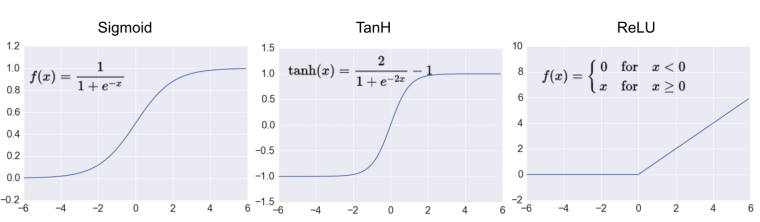
Activation function
After multiplying each input x for it’s corresponding weight, and added the bias. The perceptron should decide if to activate and how much, this is the job activation function. Theorically sigmoid the introductory, in practice ReLU or leakyReLU its used.
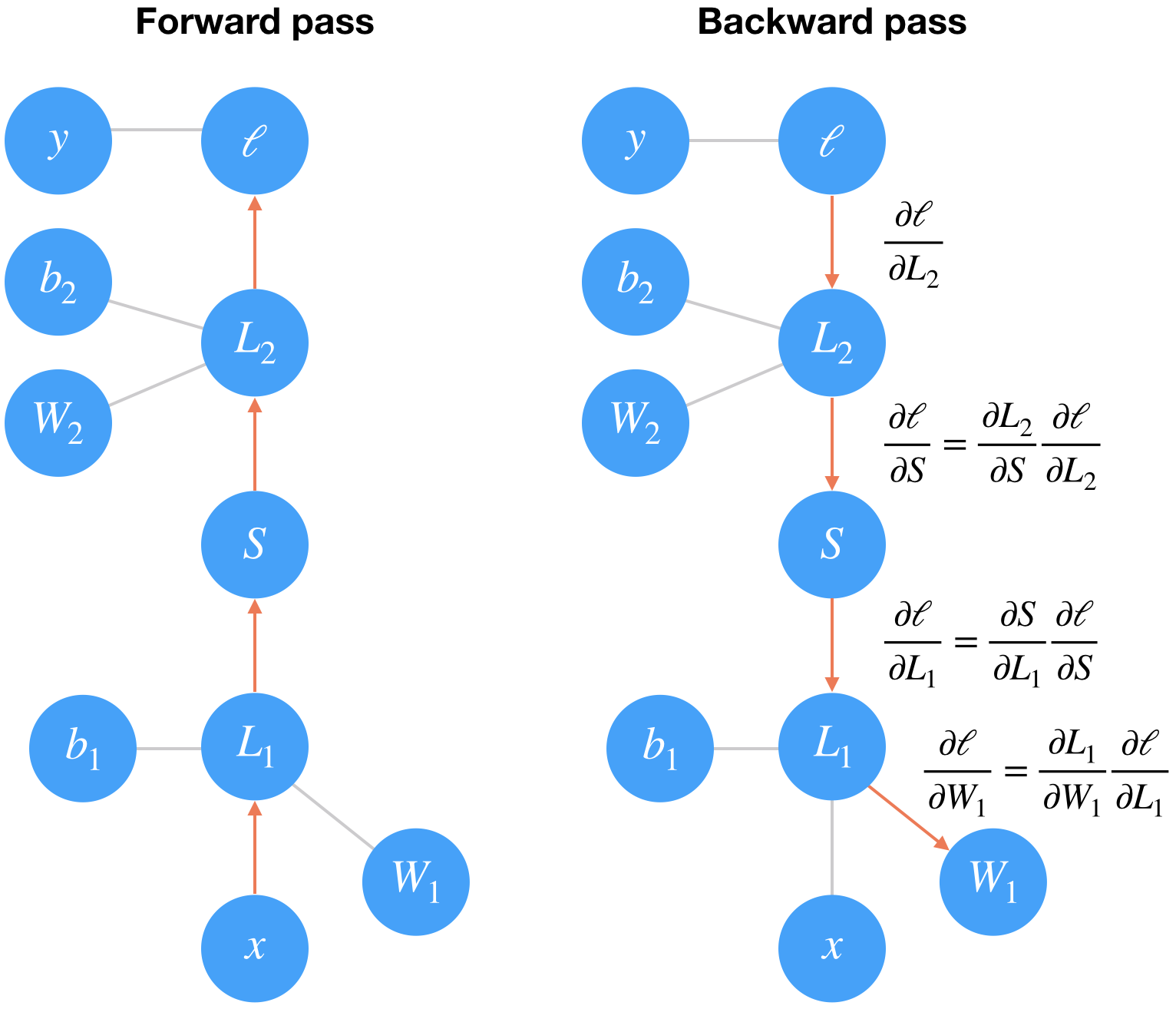
Feed forward and backwards
Feed forward is the process of getting predictions, feeding the network with features and ending with labels / value(s) predictions.
The result of each perceptron can be noted as:
\(\hat{y} = \sigma(w_1 x_1 + w_2 x_2 + b)\)
where \(\hat{y}\) is the output, sigma the activation function, for each input x is a weight w, and a bias b is added.
Layers types
- Direct connected layers
- Convolutional layers
- Pooling layers
- RNN
Weights initialization
Good practice is to start your weights randomly in the range of \([-y, y]\) where:
\[y=1/\sqrt{n}\](\(n\) is the number of inputs to a given neuron). Optimally random normal distribution having a mean of 0 and a standard deviation of \(y=1/\sqrt{n}\), so most of the values are close to 0.
Architectures
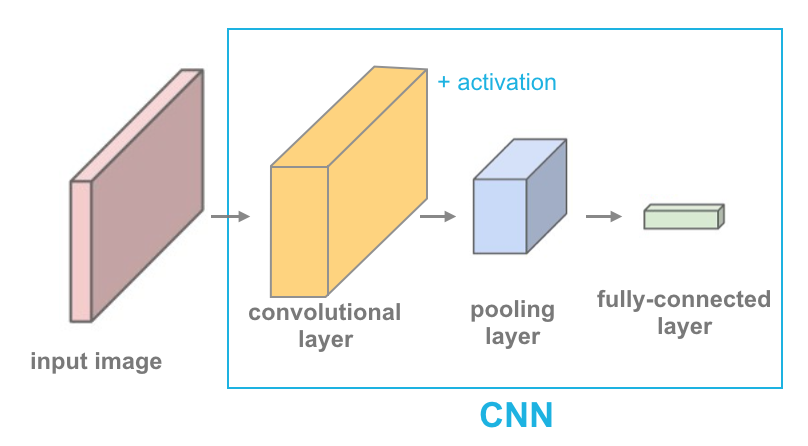
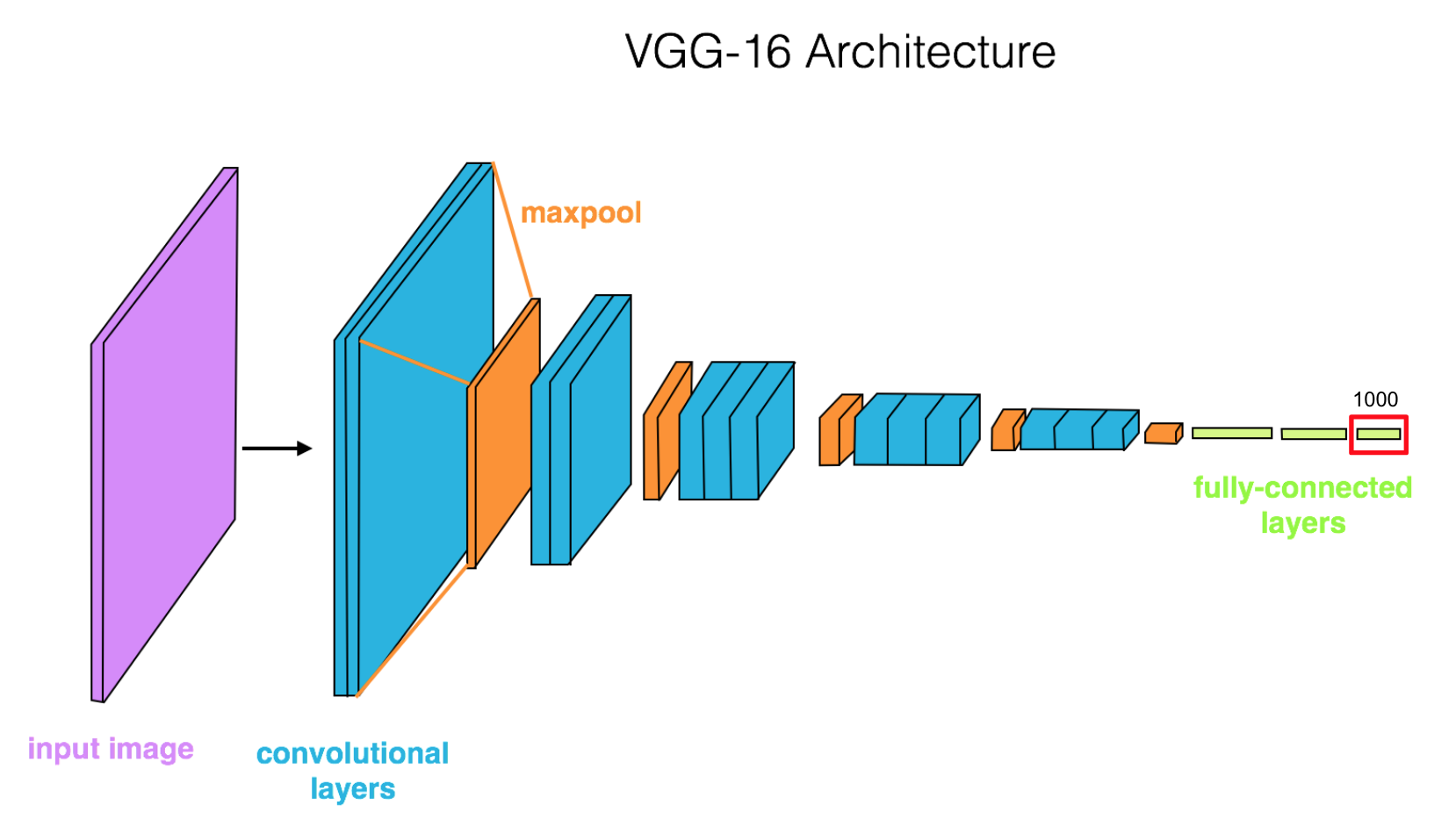
Convolutional Neural Networks
CNNs are nn architectures mostly for image/video processing, where the input its converted to narrow (\(x\) and \(y\)) but deeper (\(z\)) layers.
CNN Models
- State of art fast model: Squeeze Next
Transfer learning
Most of “real world” cases, you will do a transfer learning from a pre-trained model, like ImageNet take weeks on multiple GPUs. Using all but last layers as feature extractors (freezing its weights) and re-training only last layer (red in image) as classifier for you custom task.
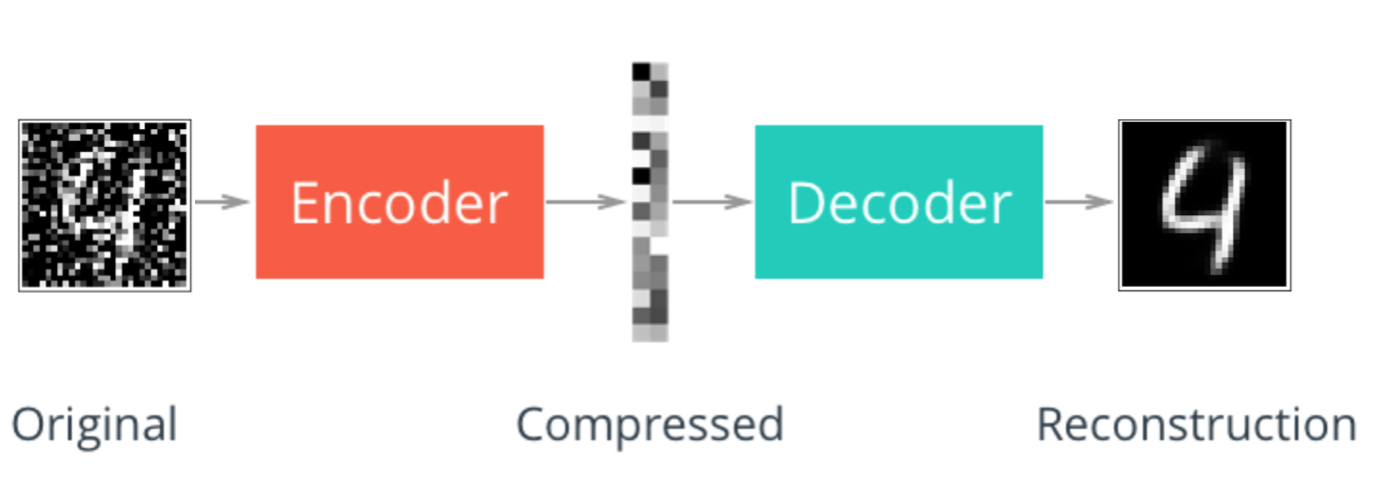
Auto encoders
Using the same logic of transfer learning, you can “upsample” the features using transpose convolutional layers
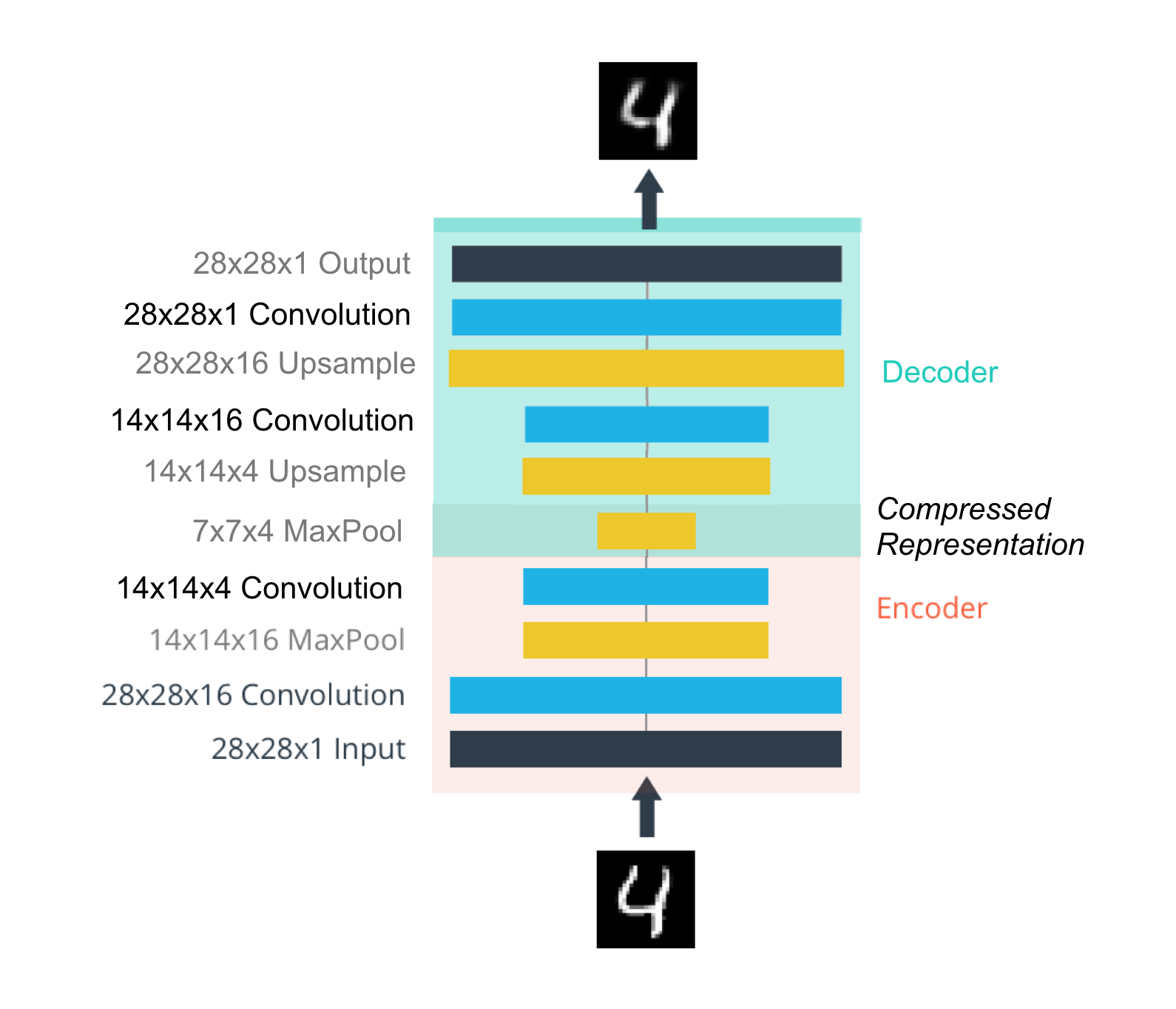
This is useful for compressing and denoising images (“convolutable” data).
Style transfer
If you can extract features with the previous techniques focusing on the last layer, then, focusing on the previous layers, you can extract “style”. The simplest example of this is called style transfer, where you can transfer “the style” from an image and combine with “content” (features) in a new image. Check out torch docs.
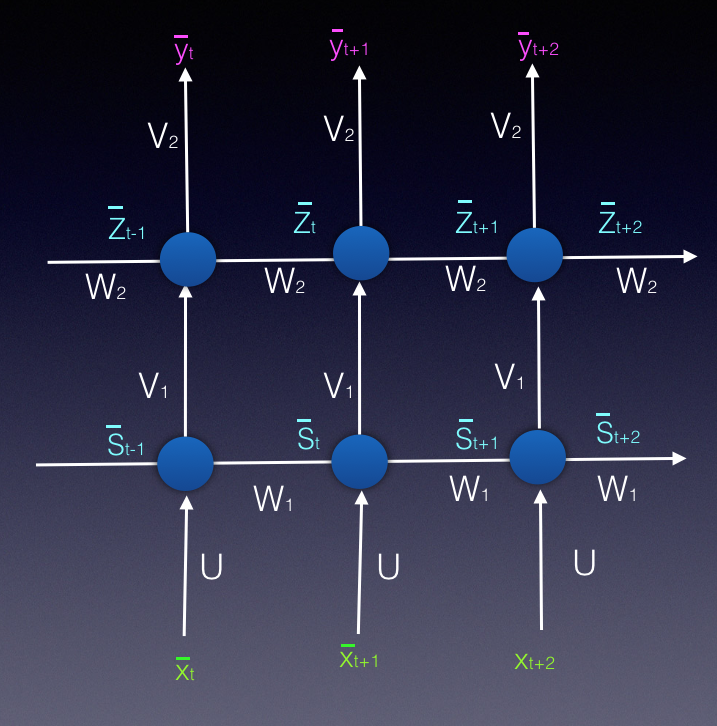
Recurrent Neural Networks
RNN’s offer a way to incorporate memmory to neural networks. This is useful for any sequential data, specially time series and text processing. This is archived by adding memmory elements
TDNN (1989)
Fist RNN kind, the past inputs where added as features. The problem is that only looks at a fixed window of past inputs (as much as it defined by network architecture).
Simple RNN / Elman Network (1990)
Pending…
The vanishing gradient problem
The vanishing gradient its a problem in which the contribution of information decays geometrically over time. Then capturing relationships that span more than 8 or 10 steps back becomes practically impossible.
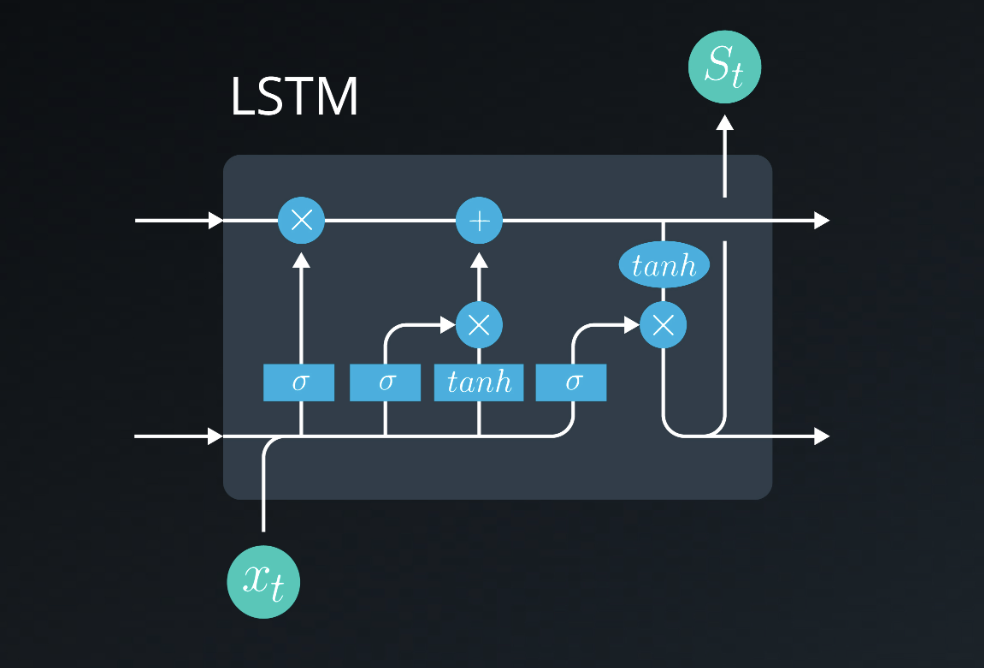
\[\tiny \frac{\partial y}{\partial w_{ij}} \small \frac{\partial y}{\partial w_{ij}} \large \frac{\partial y}{\partial w_{ij}} \LARGE \frac{\partial y}{\partial w_{ij}} \Huge \frac{\partial y}{\partial w_{ij}}\]LSTM (1997)
To fix the vanishing gradient problems, Long Short-Term Memory Cells cell are created, which can keep fixed some signals (state variables) by using gates, and then introduce them or not in proper time in the future.
Gated Recurrent Units (GRUs)
LSTM variant…
Attention, transformers and GP2
Pending…
Generative Adversarial Networks
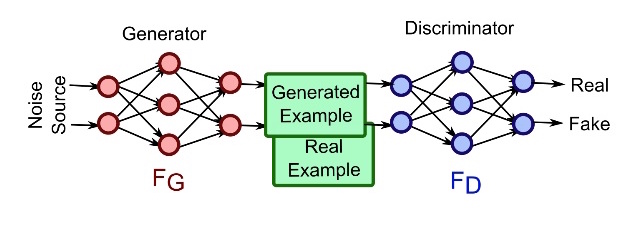
GAN’s are unsupervised model, that allow to generate new data. They are two coupled networks:
- The Generator: a network which tries to “fool” the second networks
- The discriminator: a classifier which tries to detect the origin natural or created of content
Both networks learn together, as the second net become better at classify inputs, the first has to become better at generating them in order to “fool it”.
Deep Convolutional Generative Adversarial Network (2016)
Are specialized GAN on spacial data, where:
- The discriminator: its a convolutional neural network that aims to classify data as real or fake
- The generator: its a transpose convolutional network that aims to upsample a latent vector \(z\) and generate realistic images that can fool the discriminator.
Pix2pix (2018)
If you treat generator, as a decoder, adding a encoder before, which you feed with a image of domain A. And, feed the discriminator with a pair of images, the original domain A, and original/generated domain B, so tries to determine if the output (domain B) image is a fake or real pair of original (domain A). It needs paired image data.
Links:
Paper: Image-to-Image Translation with Conditional Adversarial Networks
Cat draw to can photo demo
CycleGAN
Architecture guidelines for stable DCGANs:
- Replace any pooling layers with strided convolutions (discriminator) and fractional-strided convolutions (generator)
- Use batch normalization in both the generator and the discriminator
- Remove fully connected hidden layers for deeper architectures
- Use ReLU activation in generator for all layers except the output, which uses Tanh
- Use LeakyReLU activation in the discriminator for all layers
DCGAN paper: Unsupervised Representational Learning with Deep Convolutional Generative Adversarial Networks
Batch normalization (2015)
The idea is that, instead of just normalizing the inputs to the network, we normalize the inputs to every layer within the network.
It’s called “batch” normalization because, during training, we normalize each layer’s inputs by using the mean and standard deviation (or variance) of the values in the current batch. These are sometimes called the batch statistics.
Specifically, batch normalization normalizes the output of a previous layer by subtracting the batch mean and dividing by the batch standard deviation.
Batch normalization paper: Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift
Guidelines for adding batch norm:
- Add batch norm layers inside
__init__function - Layers with batch normalization do not include a bias term. So, for linear or convolutional layers, you’ll need to set
bias=Falseif you plan to add batch normalization on the outputs. - Be sure of using the appropriate n dimentions norm layer (
torch.nn.BatchNorm1d,torch.nn.BatchNorm2dortorch.nn.BatchNorm3d) - Add the batch normalization layer before calling the activation function, so it always goes layer > batch norm > activation.
Code snippets
Data loaders
GPU auto
import torch
# check if CUDA is available
train_on_gpu = torch.cuda.is_available()
if not train_on_gpu:
print('CUDA is not available. Training on CPU ...')
else:
print('CUDA is available! Training on GPU ...')
Define model
import torch.nn as nn
import torch.nn.functional as F
# define the CNN architecture
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
# convolutional layer (get a 32 x 32 x 3 vector in)
self.conv1 = nn.Conv2d(3, 16, 3, padding=1)
# convolutional layer (get a 16 x 16 x 16 vector in)
self.conv2 = nn.Conv2d(16, 32, 3, padding=1)
# convolutional layer (get a 8 x 8 x 32 vector in)
self.conv3 = nn.Conv2d(32, 64, 3, padding=1)
# max pooling layer
self.pool = nn.MaxPool2d(2, 2)
# dropout layer (p=0.25)
self.dropout = nn.Dropout(0.25)
# Linear layer 1 (get a flated 4x4x64 vector in)
self.linear1 = nn.Linear(4 * 4 * 64, 500)
self.linear2 = nn.Linear(500, 10)
#self.output_layer = nn.LogSoftmax(dim=1) # Takes 10 inputs (classes)
def forward(self, x):
# add sequence of convolutional and max pooling layers
x = self.pool(F.relu(self.conv1(x)))
x = self.pool(F.relu(self.conv2(x)))
x = self.pool(F.relu(self.conv3(x)))
# flatten image input
x = x.view(-1, 64 * 4 * 4)
# add dropout layer
x = self.dropout(x)
x = F.relu(self.linear1(x))
# add dropout layer
x = self.dropout(x)
x = F.log_softmax(self.linear2(x), dim=1)
#x = F.softmax(x, dim=1)
return x
# create a complete CNN
model = Net()
print(model)
# move tensors to GPU if CUDA is available
if train_on_gpu:
model.cuda()
Set an optimizer
import torch.optim as optim
# specify loss function
criterion = nn.NLLLoss()
# specify optimizer
optimizer = optim.LBFGS(model.parameters(), lr=1)
Training loop
Its where the net is trained, example:
# number of epochs to train the model
n_epochs = 30 # you may increase this number to train a final model
valid_loss_min = np.Inf # track change in validation loss
for epoch in range(1, n_epochs+1):
# keep track of training and validation loss
train_loss = 0.0
valid_loss = 0.0
###################
# train the model #
###################
model.train()
for data, target in train_loader:
# move tensors to GPU if CUDA is available
if train_on_gpu:
data, target = data.cuda(), target.cuda()
def closure():
# clear the gradients of all optimized variables
optimizer.zero_grad()
# forward pass: compute predicted outputs by passing inputs to the model
output = model(data)
# calculate the batch loss
loss = criterion(output, target)
# backward pass: compute gradient of the loss with respect to model parameters
loss.backward()
return loss
# perform a single optimization step (parameter update)
optimizer.step(closure)
# calculate the batch loss
loss = criterion(output, target)
# update training loss
train_loss += loss.item()*data.size(0)
######################
# validate the model #
######################
model.eval()
for data, target in valid_loader:
# move tensors to GPU if CUDA is available
if train_on_gpu:
data, target = data.cuda(), target.cuda()
# forward pass: compute predicted outputs by passing inputs to the model
output = model(data)
# calculate the batch loss
loss = criterion(output, target)
# update average validation loss
valid_loss += loss.item()*data.size(0)
# calculate average losses
train_loss = train_loss/len(train_loader.dataset)
valid_loss = valid_loss/len(valid_loader.dataset)
# print training/validation statistics
print('Epoch: {} \tTraining Loss: {:.6f} \tValidation Loss: {:.6f}'.format(
epoch, train_loss, valid_loss))
# save model if validation loss has decreased
if valid_loss <= valid_loss_min:
print('Validation loss decreased ({:.6f} --> {:.6f}). Saving model ...'.format(
valid_loss_min,
valid_loss))
torch.save(model.state_dict(), 'model.pt')
valid_loss_min = valid_loss